
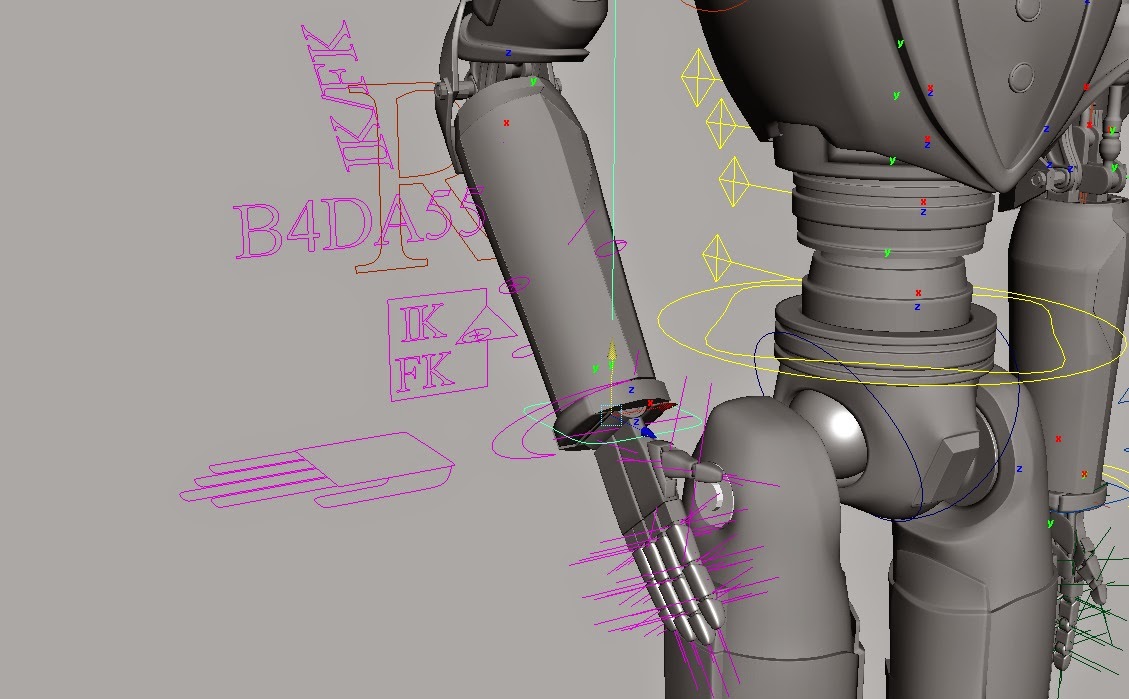
In this image, you can see an IK rig functioning of what it seems to be right. However, the biggest headache arises when you discover more problems and trying to solve them brings you back to square one. Before I began my 3-4 days devastating troubleshooting journey, let me explain to you how the mechanism is suppose to work on this robotic arm.
As you can see, this robotic wrist is modeled in a way that it can only turn 2 axis; the cylinder connected to the lower part of the hand and the hinge joint between the cylinder and coin like shape at the end of the lower arm. This is a huge problem especially for IK rigs because IKs are function to rotate in all directions. Moreover, the challenge is that there are 2 parts involve in 2 different rotations. So the first thought that came into my mind was to orient it in only 2 axis that i rotates and parent them according to hierarchy.Things seem to look right for a change until I translated...in a different direction.
To my dismay it wasn't as simple as logic sounds. It brought up a new problem right away.

The parts began to intersect and there was no way a hierarchy solution could solve it. Tested and PROVEN! Self explanatory of how it works from the image. So I began to consult my best pal, the master of RIGGING! You got that right, GABRIEL!
He came up of what it seems only a temporary solution to the problem. Yes, creating a double joint for the 2 separate rotation parts. Kind of like the IK twist rig for the wrist joint in organic characters. However, after testing I encountered cyclic warning. In other words 2 or more things are rotating the same part and in the same axis. Sadly, I don't have an image to show as I accidentally deleted the file because it did not work out. In retrospect, there were still intersection, trying to force the IK ctrl to follow perpendicular to the lower arm would cause the cyclic warning.
So after almost a week of troubleshooting, I decided to consult my lecturers. It was tricky at first but he came up with this solution of a rig.

All seems to go well. Translating Y and rotating Z.

Rotation too, until this

What seems to be unavoidable. The wrist rotates as you translate X.
Hence, the problem was still unsolved.
Until i realized, why use joints when I'm rigging a DAMN ROBOT?! *facepalmed*
After realizing I knew exactly what I had to do, and time was not on my side. So what I did was use locators to control the fingers through a set of SDKs. Got rid of the double jointed wrist and set a control SDK for the IK/FK to rotate separately, except for the cylinder that is connected to the hand, that part it driven by a crescent moon shape control.
So in conclusion, you gotta cheat and work SMART! Glad that's DONE!
No comments:
Post a Comment